当社は新たなチャレンジの一環として【画像認識】にもチャレンジしております。
当社では画像認識に対する知見を得る目的から【画像認識PoC開発PJ】を立ち上げました.
今回のプロジェクトの目的
- ベトナムオフショアを活用した先端技術への対応検討
- 国内企業との比較検討
- 学習モデルのエッジコンピューティングへの取組み検討
上記3点に対し、知見を得る為に今回のPJを起こしました。
プロジェクト概要
特定の交通標識の画像認識モデルを作成し、スマートフォンアプリに実装。
リアルタイムに画像認識をし、認識した場所を地図上にプロッティングするアプリケーションを作成する。
交通標識の種類
【駐車禁止】【50km規制】【方面看板】の3種類の交通標識を認識する。

サービスのイメージ
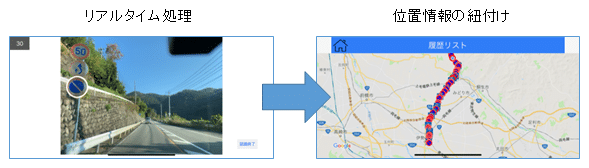
画像認識部分について
今回のプロジェクトの目的のひとつ[ベトナムでの先端技術への対応検討]を検証する為、学習モデルの作成をベトナム側パートナーにお願いする事となりました。
当社の人的パイプラインと研究的意味合いから
ホーチミン市情報工学大学 MMLab Duy教授
と協議し、学習モデルの作成・チューニングを依頼する事としました。
MMLabについて
今回、PoC制作にあたり共同で開発頂いたMMLabはAIの技術取得を目的とした研究室でコンピュータービージョン・AIに特化した最先端の研究所です。
MMLab Duy教授はアメリカ国立標準技術研究所(NIST)のスポンサーで行われたTRECVIDワークショップを含む多くの技術コンテストに参加し、画像検索部門において多くの受賞経験があります。
※MMLabの紹介はこちら(http://mmlab.uit.edu.vn/)
※教授の経歴についてはこちら (https://researchmap.jp/ledduy)
画像認識アプリPJでの役割分担
今回のPJでは下記の様な体制でサービスを構築する事となりました。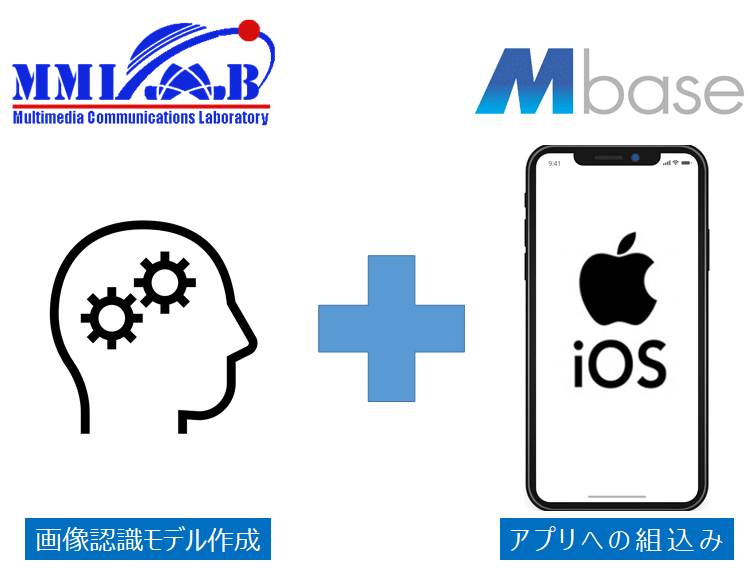 お互いの長所を組合せる事で、スマートフォンを活用したエッジコンピューティングを実現。
お互いの長所を組合せる事で、スマートフォンを活用したエッジコンピューティングを実現。
リアルタイム画像認識により、結果だけをクラウドにアップする事でサーバコストの大幅な実現とリアルタイムでの情報共有環境を実現しました。
画像認識の精度について
検証方法としては、似た状況で別途取得したルートの画像をPC上で流し確認をしました。
実際の時間帯や気象条件によって変わってきますが、当社試験においては…
▼駐車禁止の精度
1:再現率 (recall) 95%以上
2:適合率 (precision) 95%以上
▼50km規制の認識精度
1:再現率:95%以上
2:適合率:85%以上
という非常に高い成果を得る事が出来ました。
今回のプロジェクトの結果について
1:ベトナムオフショアを活用した先端技術への対応検討
ベトナムにおいてもAIをはじめとした研究は進んでおり、人材の育成を積極的に進めております。
適切な研究所や企業にアプローチする事で先端技術を用いた開発でもベトナムにおいて実施する事は十二分に可能でした。
2:国内企業との比較検討
国内とオフショアとでの開発同様、コミュニケーションが最も難しいと思われますが、オフショア開発で長年培ったノウハウを基に密接なコミュニケーションをとる事で国内企業と変わらない開発が出来たと思っております。
また、費用についても一般的な国内企業とくらべ、約1/3に抑える事が出来ました。
※開発内容やレポートタイミングによって異ります。
3:学習モデルのエッジコンピューティングへの取組み検討
学習モデルのスマートフォンへの実装はスムーズに移行できるケースとそうでないケースがありますが、今回のプロジェクトにおいては比較的スムーズに実現する事が出来ました。
エッジコンピューティングを実現する事でサーバコストの大幅な削減やリアルタイム処理による時間短縮・工数の削減など様々なメリットがある事を改めて確認する事が出来ました。