
当社では【組込系開発】+【ネイティブアプリ開発】といった得意技術を活かしIoT開発やPoC制作も承っております。
ネイティブアプリやクラウド環境との連携など、お客様のニーズに合わせワンストップでサービスを開発する事ができます。
今回はその一例として自動運転PoC及び操作アプリをご紹介いたします。
PoCの走行イメージ
当社のPoCはスマートフォンからの遠隔操作だけでなく、決まったルート上の自動運転などにも対応しております。
また、車体前方に設置した超音波センサーにより障害物を認識した際の緊急停止機能も有しております。
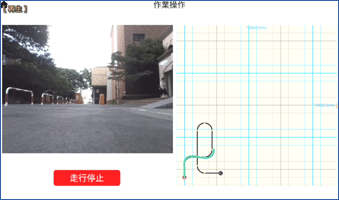
スマートフォンアプリのイメージ
マニュアル走行モード
タブレットで3段階の速度調整とジョイスティックタイプのUIを使って自由に操作する事が出来ます。
自動走行モード
経路を作成し、そのルートに沿って自動走行を行います。
経路の作成方法は2種類
1:キー操作モード
前後左右でルートを作成していきます。
画面をフリーハンドでなぞると、なぞった軌跡を認識し経路に変換できます。
自動駐車モード
縦列駐車や並列駐車と動作をワンタッチで行う事が出来ます。
高画質映像転送
搭載したカメラから映像をストリーム受信する事が出来ます。
H.264コーデックに対応する事で遅延の少ない高画質な映像配信により、遠隔操作的に操縦する事も出来ます。
障害物検知
自動走行中に前方に障害物を検知すると、走行を停止します。
PoC制作で活用した各種素材
ボディ・シャーシ

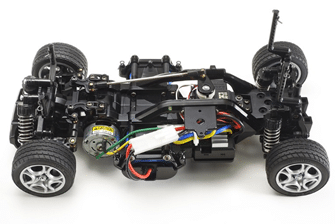
今回は1/10RC マツダ デミオ (M-05シャーシ)を利用しました。
ハードウェア
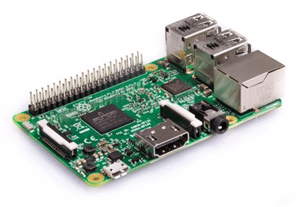 各種センサーの制御を行うメインのコンピュータです。
各種センサーの制御を行うメインのコンピュータです。
最新のRaspberry Pi 3 Model Bを利用しました。
走行距離センサー
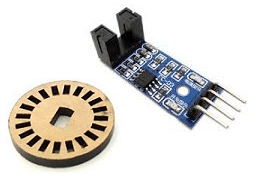 タイヤの回転数などを計測して、どれくらいの距離を走行しているかを測定します。
タイヤの回転数などを計測して、どれくらいの距離を走行しているかを測定します。
Optocoupler Slot-Typeを利用しました。
9軸センサー
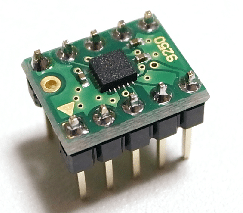 位置・方位を特定する目的で使用します。
位置・方位を特定する目的で使用します。
MPU-9255を利用しました。
カメラユニット
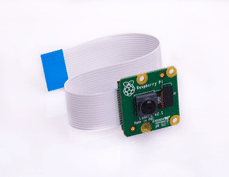 カメラモジュールで前方の映像を流します。
カメラモジュールで前方の映像を流します。
リアルタイム性を持たせる為、H.264コーデックに対応しました。
※アプリに組込みライブラリを自社で開発
Raspberry Pi Camera Module v2を利用しました。
超音波センサー
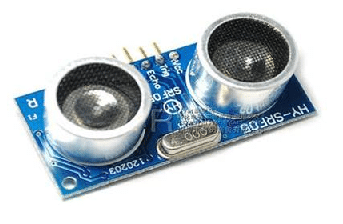 前方に障害物があるか検知します。
前方に障害物があるか検知します。
SRF05-CNを利用しました。
SDカード
OS、アプリモジュールと設定内容を保存するストレージとして利用しました。
ご興味を持たれた方はこちらから
IoTを想定したPoC制作および連携したアプリやクラウドサービスへの興味を持たれた方はお気軽にご連絡ください。